The smallest CTD chain system consists of a deck unit and few sensor fins on a
short insulated steel rope with some ballast or depressor, light enough to be
deployed by hand over the railing. Larger systems require an efficient depressor with a swivel, an appropriate pulley similar to the one shown on the overview page, cable fairings, and a winch. The
radius of the pulley and the winch drum must be sufficiently large that the
pressure during system deployment and recovery acts only on the stoppers on
both sides of a sensor fin, but not on the fin edge. The pulley may be replaced
by an adequately shaped chute. Since there is always a trade-off between
optimal area coverage and the breaking strength of the tow cable, fairings should
never be waived, unless the system is only used while drifting. Fairings reduce
cable tension and enlarge the depth range. The application of a cable tension
meter is highly recommended.
The tow cable acts as a data bus. Each sensor fin has a unique 8-bit address. On
reception of its address a sensor fin transmits the contents of the output
buffers. The special address 0x00 is common to all sensor fins. It marks a
cycle start and compels the sensor firmware to transfer instant measurements
into the output buffers. This mechanism guarantees simultaneity within a chain
record irrespective of the polling sequence. Digital data are transferred
between deck unit and sensor fins as frequency encoded asynchronous serial
8-bit data plus parity. The bit rate is 9600 Baud. It takes about 9
milliseconds to send three 16-bit data items (T, C, P) and a checksum byte.
While listening for data the deck unit is silent and thus does not deliver
power to the fins. For proper energy transfer the address sending time is
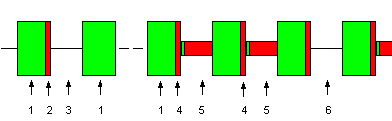
extended to several milliseconds. The sketch below
illustrates the timing of the CTD chain system.
The recurrent on-off of the supply signal is controlled by the acquisition program,
the time critical component of which resides in a dedicated USB link connecting a PC to the deck unit.
The AC signal transmitted through the tow cable
and coupled to the sensor electronics is rectified and gathered in a capacitor
which feeds the internal voltage regulators. When the capacitor voltage rises
beyond an upper threshold, further supply is inhibited until the voltage drops
below a lower threshold. During supply rejection the input impedance of the
sensor fin becomes small. Therefore a current leveller should limit the maximum
current in the CTD chain cable.
Deck unit and data acquisition PC are separate items. An RS232 serial port interfaces the deck unit. The RTS line of this port is used to switch the deck unit between sending and listening. Command bytes (addresses) are always issued at the end of a sending period. The frequency of the transmission to the CTD chain changes between 51 and 41 kHz at serial bit boundaries. When RTS drops off, the deck unit is ready to capture a sensor response, which is frequency encoded at 68 and 77 kHz, after less than 0.5 milliseconds. Frequencies are converted to binary signals and delivered to the serial port. The quick change between energetic transmission and delicate listening constitutes a challenge for the deck unit. Noise originating from heavy machinery such as cranes or inappropriate grounding can corrupt receptions from single sensor fins. Wave forms may be inspected by means of a storage oscilloscope connected to a BNC socket on the front panel of the deck unit. Another socket provides a trigger for the oscilloscope. The trigger can be timed for the enquiry of any specific sensor fin selected by a key command of the acquisition program. The DTR line of the RS232 interface is used for the transmission of the trigger signal to the deck unit.
The concept for data acquisition and chain operation was developed in the nineties. The acquisition program CTDCHAIN.EXE was written in Borland Pascal. It bends interrupt vector towards own service routines. It reads from and writes directly into ports of the PC hardware such as the UART, the 8253 timer, the 8259 interrupt controller, the CMOS Real time clock, the graphics controller and the EGA graphics memory. Only a single task operation system lets a user program take control over the most important hardware resources. A PC with an RS232 serial port (not an emulation via USB) running under DOS (not a DOS emulation) is therefore required for CTD chain control and data acquisition, if first generation ctdchain software is used for operation.
Since DOS computers with EGA graphics and RS232 communications ports have become outdated, it was time to change the data acquisition concept. Timing and control was moved into a link, which merely consists of a micro-controller with USB and serial communications ports. The link is inserted between the RS232 port of the deck unit and the USB port of a computer. New deck units have the USB link on board already. The first version of USB link firmware and the source code of a simple data acquisition program was released to the community of CTD chain users in May 2009 together with an invitation to develop an acquisition program that under Windows offers at least the same comfort as the old DOS program. Meanwhile the work on the acquisition program AcqChain.exe has been finished successfully. The software runs on any Windows PC. The format of binary data, configuration and calibration files is maintained as originally defined for the old DOS program. Data processing software such as a Matlab ctdchain library may thus be applied irrespective of one or the other acquisition program.
For further reading, e.g. about the measured temperature sensor response time or about power supply conditions on long chains, you are referred to J. Sellschopp, A towed CTD chain for two dimensional high resolution hydrography, Deep-Sea Research I, Vol. 44, No. 1, pp. 147-165 (1997). The CTD chain system underwent modifications and enhancements since then, but the overall functional description is still valid. 13-Dec-2013 js |
 The
CTD chain consists of multiple fin-shaped CTD probes aligned on a coated steel
rope. In contrast to any other electronic oceanographic instrument, the
underwater units are neither plugged to a cable nor equipped with batteries and
data storage. Critical components such as underwater connectors, grommets and
flanges were avoided by inductive coupling of the underwater units to the tow
cable. The units may freely rotate on the cable, they are inhibited from gliding
by removable stoppers. The cable, which is led through a ring core located at
the edge of the sensor fin, acts as the primary coil of the inductive coupler
that powers the sensor electronics. AC voltage with frequency 51 kHz
is provided by a deck unit and fed into the tow cable. The primary circuit is
closed by the sea water connecting an electrode at the chain tail with an
electrode at the upper end or with the hull of the towing ship. Less than 1 Ampere
of primary current suffices to energize the sensor fins. The voltage depends on
the number of underwater units and the length of the chain.
The
CTD chain consists of multiple fin-shaped CTD probes aligned on a coated steel
rope. In contrast to any other electronic oceanographic instrument, the
underwater units are neither plugged to a cable nor equipped with batteries and
data storage. Critical components such as underwater connectors, grommets and
flanges were avoided by inductive coupling of the underwater units to the tow
cable. The units may freely rotate on the cable, they are inhibited from gliding
by removable stoppers. The cable, which is led through a ring core located at
the edge of the sensor fin, acts as the primary coil of the inductive coupler
that powers the sensor electronics. AC voltage with frequency 51 kHz
is provided by a deck unit and fed into the tow cable. The primary circuit is
closed by the sea water connecting an electrode at the chain tail with an
electrode at the upper end or with the hull of the towing ship. Less than 1 Ampere
of primary current suffices to energize the sensor fins. The voltage depends on
the number of underwater units and the length of the chain. The photograph on the left shows a considerable alternative to standard towing directly
from the deck. Here the CTD chain was deployed from the German research vessel Planet
together with a surface float. The tow cable and the plug for the electronic deck unit
was handed over to the cooperating Swedish Urd, a boat of too small size for unassisted
deployment, but appropriate for towing. Aside from easy transfer, a CTD chain hanging
below a surface float has three more advantages. First, a float can be steered outside
the wake. Second, under high sea state conditions a float moves less and thus produces
less strain than the heaving stern. Finally, in the unlikely case of an unpredicted underwater
obstacle such as a drifting net, the underwater system can be rescued if a weak link was
included in the tow cable in front of the float. As a drawback a system with float
requires higher effort during deployment and recovery.
The photograph on the left shows a considerable alternative to standard towing directly
from the deck. Here the CTD chain was deployed from the German research vessel Planet
together with a surface float. The tow cable and the plug for the electronic deck unit
was handed over to the cooperating Swedish Urd, a boat of too small size for unassisted
deployment, but appropriate for towing. Aside from easy transfer, a CTD chain hanging
below a surface float has three more advantages. First, a float can be steered outside
the wake. Second, under high sea state conditions a float moves less and thus produces
less strain than the heaving stern. Finally, in the unlikely case of an unpredicted underwater
obstacle such as a drifting net, the underwater system can be rescued if a weak link was
included in the tow cable in front of the float. As a drawback a system with float
requires higher effort during deployment and recovery.